화성을 돌아다니며 탐사 중인 미국 항공우주국(NASA) 탐사 로버가 미끄러운 경사면에서 촬영한 화성의 모습이 공개됐다고 우주과학매체 스페이스닷컴이 최근 보도했다.
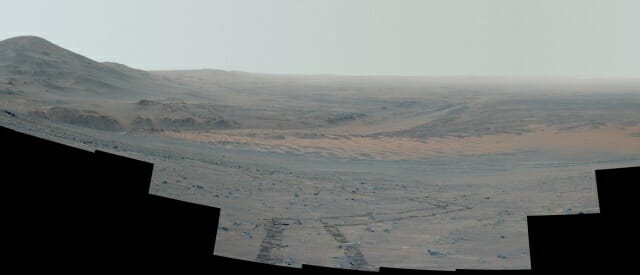
이 사진은 지난 달 27일(현지시간) 퍼시비어런스 로버가 촬영한 44장의 사진을 이어 붙여 완성한 것이다.
지난 9월 27일, 퍼서비어런스 로버가 예제로 분화구 서쪽 벽을 오르는 동안 촬영된 화성의 모자이크 사진 (출처=NASA/JPL-칼텍/ASU/MSSS)
NASA 제트추진연구소(JPL)의 리치 웰치(Rick Welch) 퍼시비어런스 프로젝트 매니저는 "이 사진은 과거와 현재 뿐 아니라 미래에 우리가 원하는 곳에 도달하기 위한 가장 큰 도전도 보여준다"며, "화성은 누구든 이 능선의 정상에 쉽게 오를 수 없도록 만들었다”고 밝혔다.
퍼시비어런스는 지난 8월 중순부터 이 지역의 등반을 시작했는데 사진에서 왼쪽에 보이는 능선인 '파어웨이 락'(Faraway Rock)이라고 불리는 지점 근처에서 이 사진을 찍었다.
출처=NASA/JPL-칼텍/ASU/MSSS
하하지만 탐사로버는 오는 12월초에나 능선의 정상에 도달할 것으로 예상된다. 이 지형이 탐사로버가 바퀴로 이동하기에는 꽤 험하기 때문이다. 산등성이의 경사도는 약 20도이며, 부서지기 쉬운 지각 위에 모래와 먼지가 쌓여있어 아주 미끄럽다.
퍼시비어런스 임무의 기획자이자 과거 큐리오시티 로버를 조정하기도 했던 NASA JPL 캠든 밀러(Camden Miller)는 “화성 탐사선이 더 가파른 지형 위를 주행한 적은 있지만, 가파르면서도 미끄러운 지형을 주행하는 것은 이번이 처음”이라고 성명을 통해 밝혔다.
사진에서 로버가 산을 오르는 동안 바닥에 남긴 발자국을 볼 수 있다. 먼지가 가득해 미끄러워보인다. 이 사진은 10월 11일 촬영됐다. (출처=NASA/JPL-칼텍/ASU/MSSS)
로버가 이렇게 험난한 지형을 주행할 수 있도록 하기 위해 연구진은 몇 가지 방법을 생각해 냈다. 첫 번째는 바퀴가 여섯 개 달린 퍼시버런스 로버를 뒤로 운전하는 방법, 또 하나는 지그재그로 운행하는 스위치백을 많이 사용하는 '크로스 슬로프' 운행 방식, 마지막은 지표면 아래에 더 크고 단단한 암석이 있을 수 있는 북쪽 가장자리 가까이에 붙어 운행하는 방법이 제시됐다.
관련기사
- 민주당, 김홍일 방통위원장 탄핵 추진..."6월내 통과 목표"2024.06.27
- 김홍일 위원장 "2인 체제 방통위, 바람직하지 않지만 위법 아니다”2024.06.21
- LG 구광모 6년...AI·바이오·클린테크 키운다2024.06.28
- 화재 막는 배터리 진단기술 뜬다...민테크, 상장 후 존재감 '쑥쑥'2024.06.28